
Features
Multiple instruments and models
The ALCF can process data from multiple ceilometers and lidars: Vaisala CL31, CL51, CL61, Lufft CHM 15k and Sigma Space MiniMPL. Multiple models and reanalyses are supported by the lidar simulator: AMPS, ERA5, JRA-55, MERRA-2, NZCSM and UM.


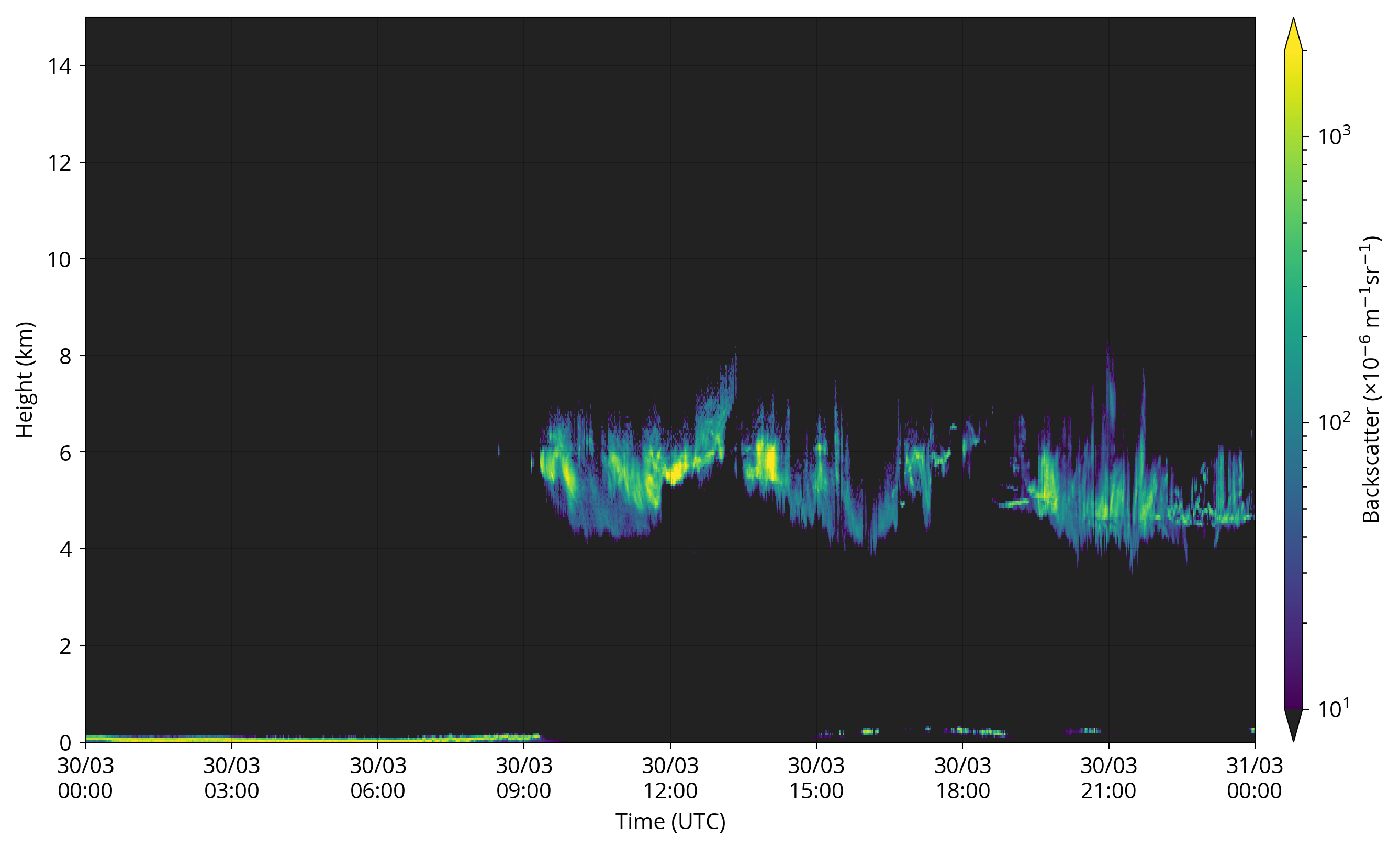
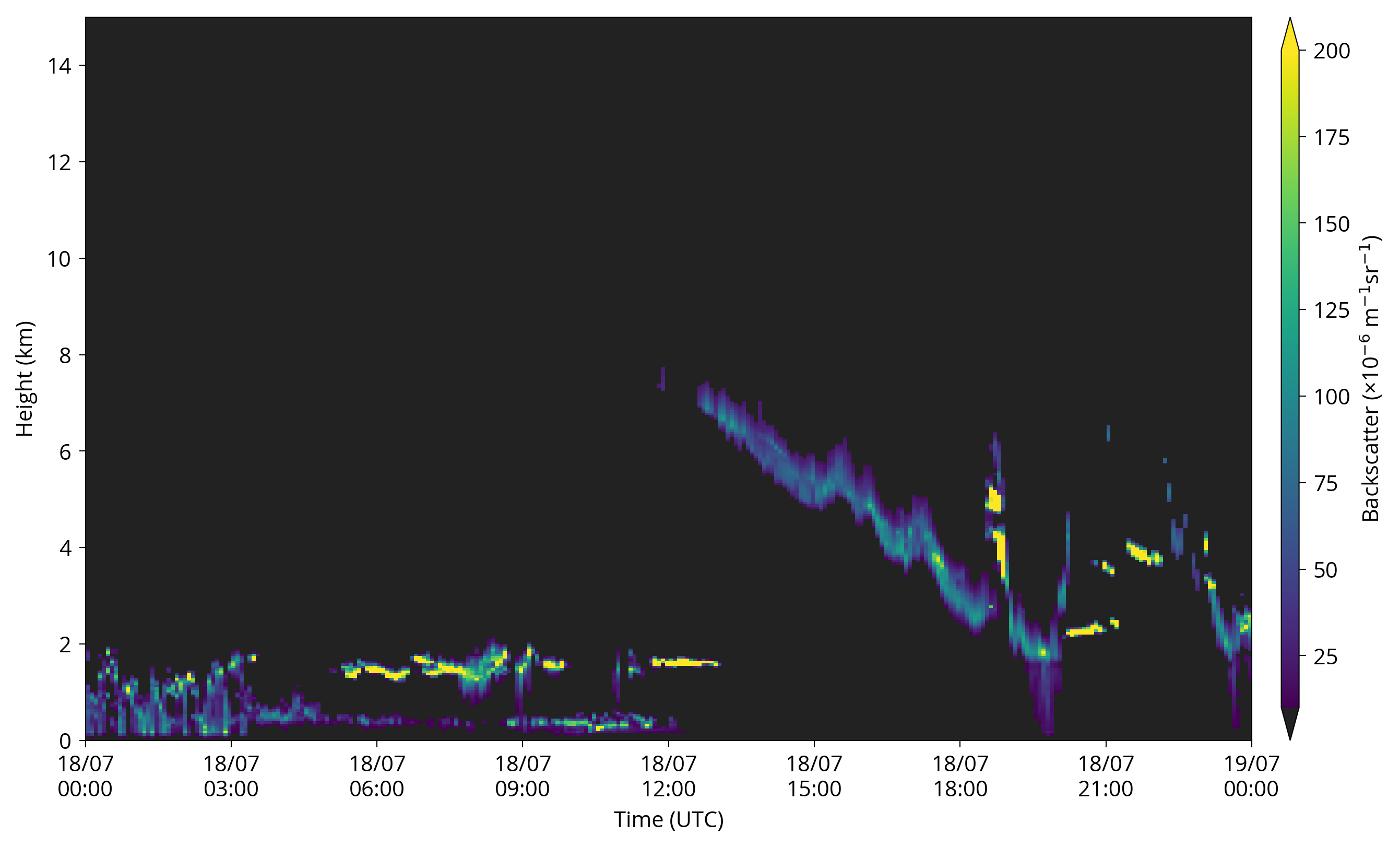
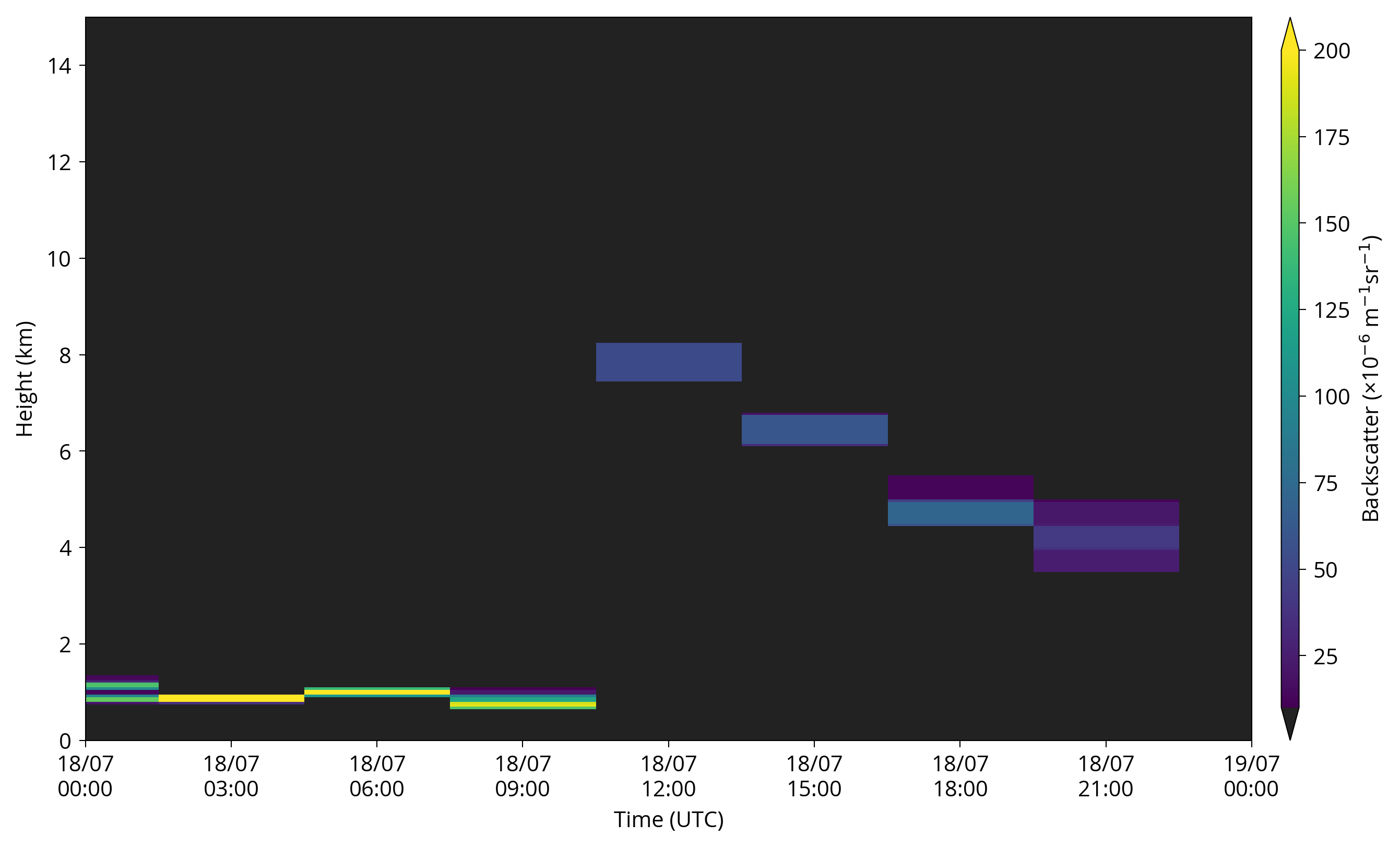
Resampling and noise removal
The ALCF resamples lidar backscatter to chosen temporal and vertical sampling to increase signal-to-noise ratio, calculates noise standard deviation from the highest level and removes noise.
Lidar simulator
Embedded lidar simulator based on COSP can be applied on model data to produce virtual backscatter measurements comparable with ALC observations for the purpose of model evaluation.
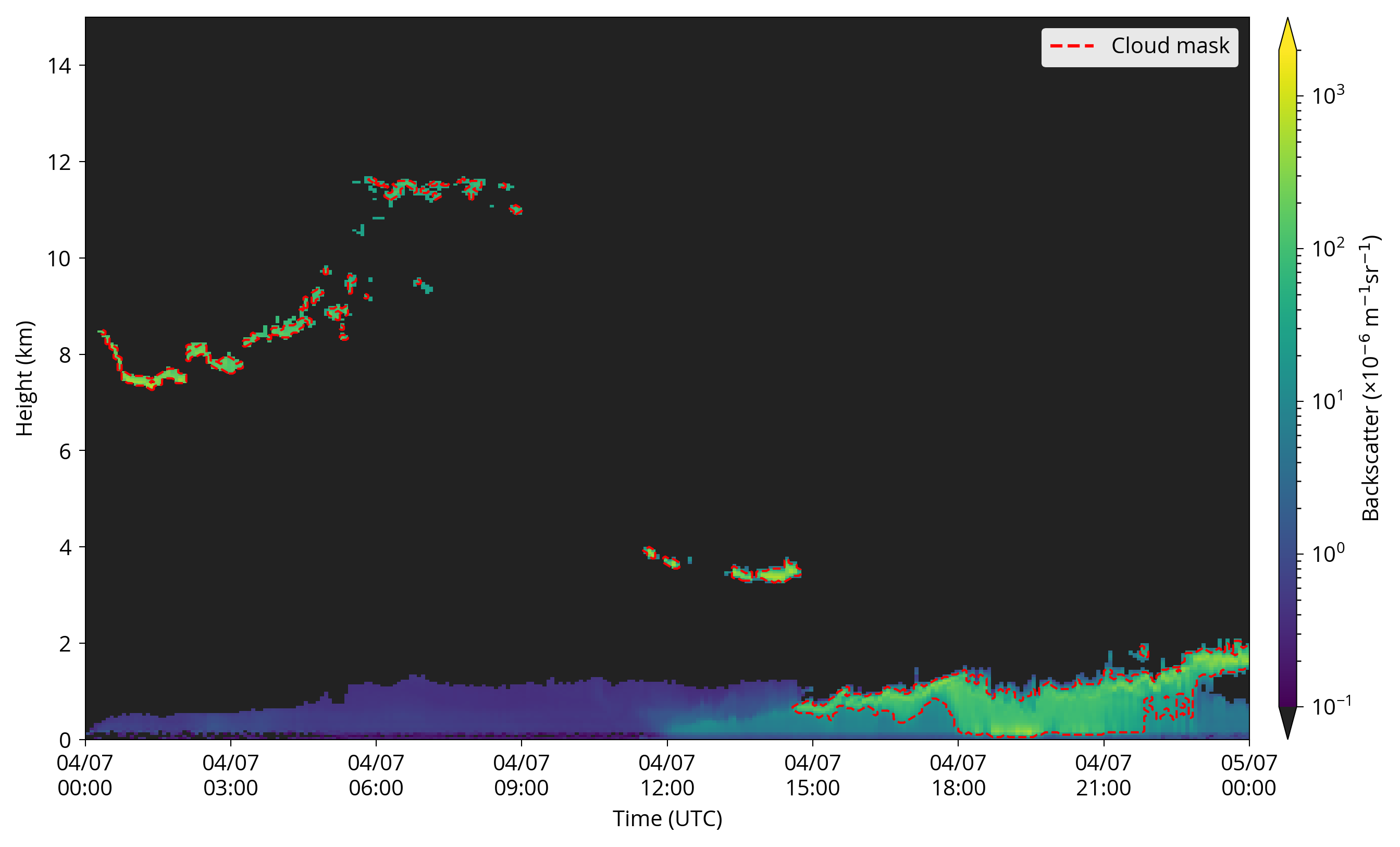
Cloud detection
Cloud detection is done by applying a threshold on the denoised absolute backscatter. More sophisticated algorithms may be added in the future.
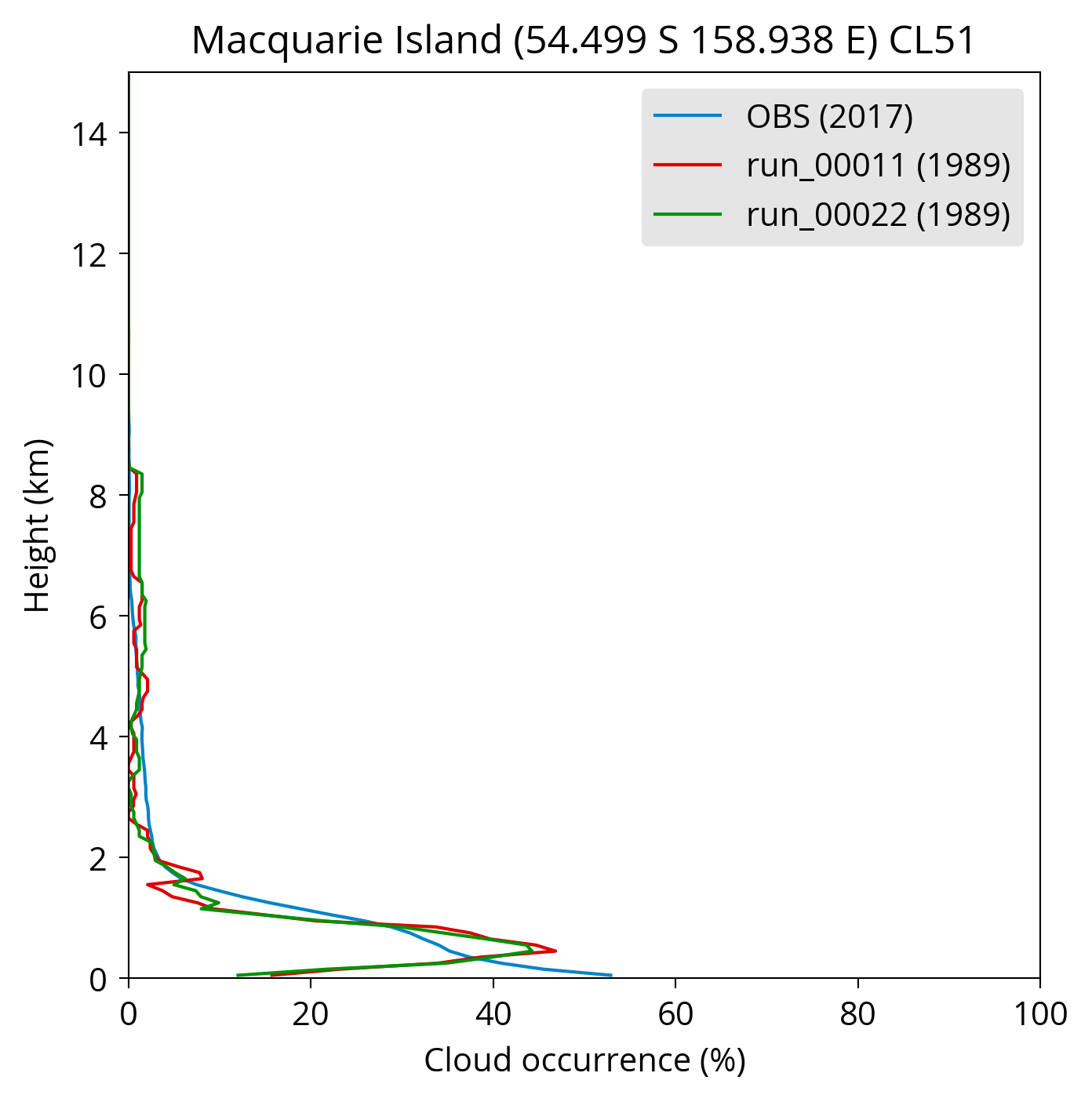
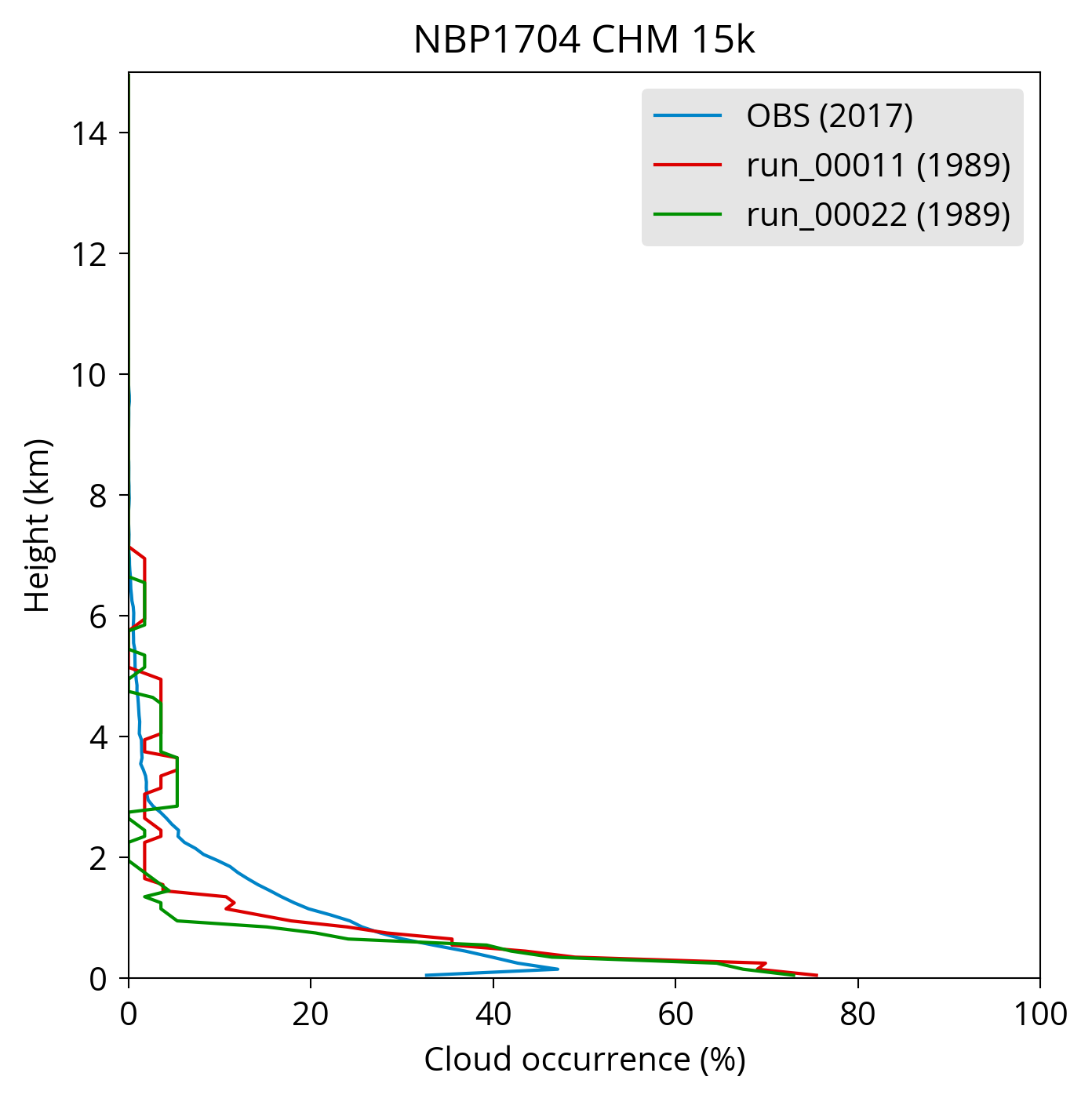
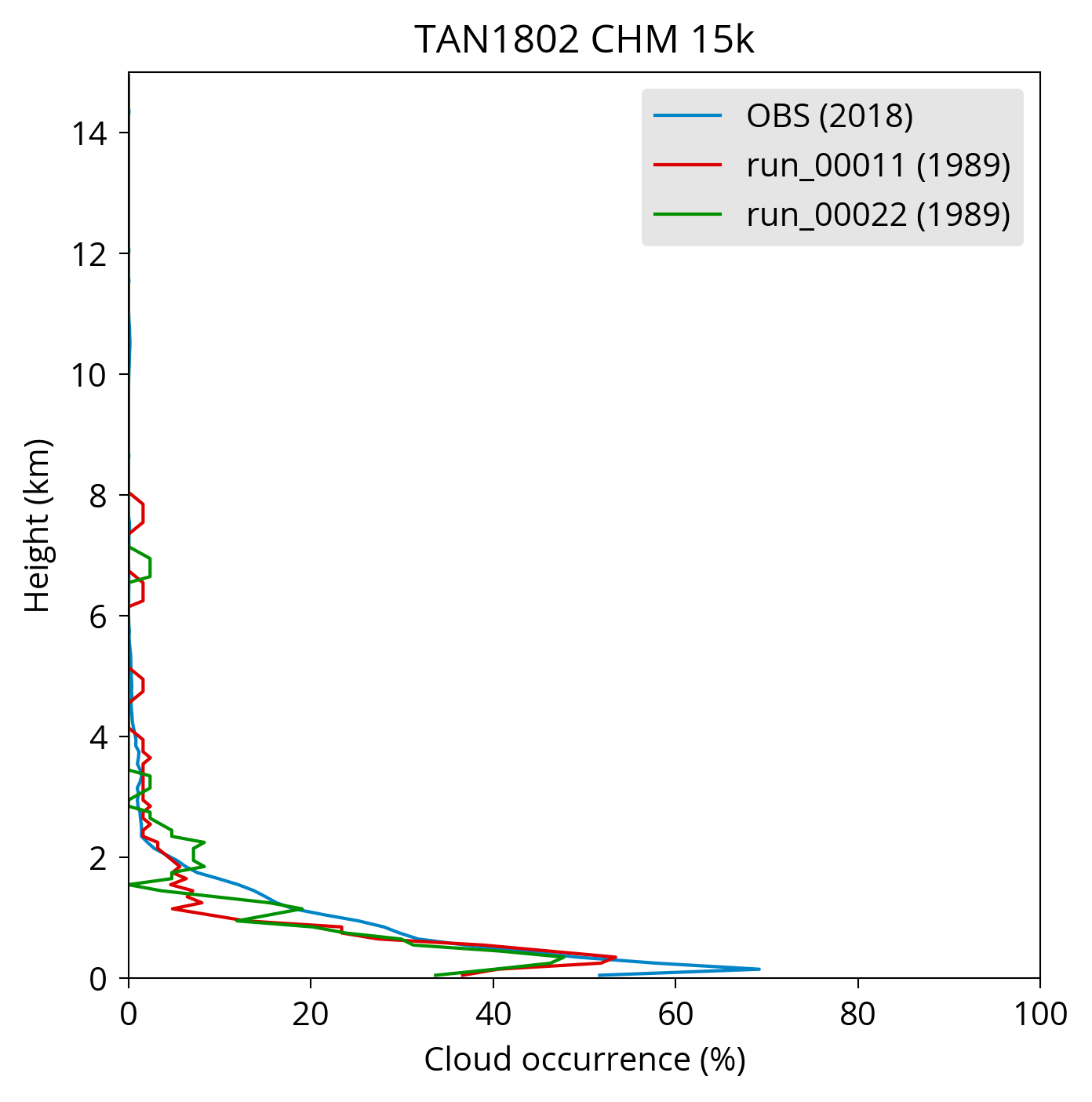
Cloud occurrence
Cloud occurrence histogram as a function of height can be calculated and plotted from observations and model simulated backscatter.
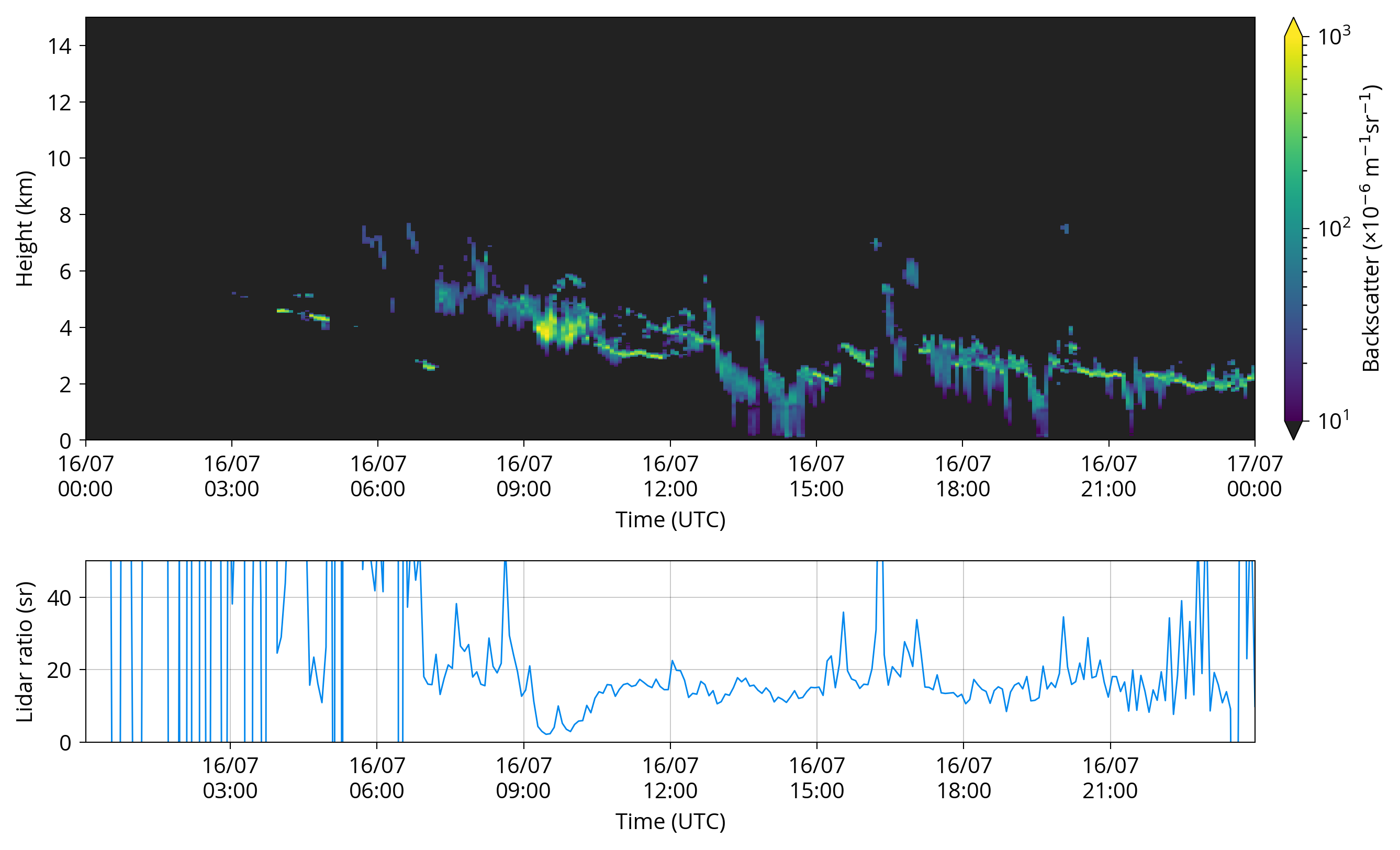
Calibration
Lidar ratio can calculated and plotted along the backscatter for absolute calibration of lidar backscatter using fully-opaque stratocumulus scenes (O’Connor et al., 2004).
Open source
The ALCF is available under the terms of the MIT license, which allows free use, copying, modification and redistribution.